


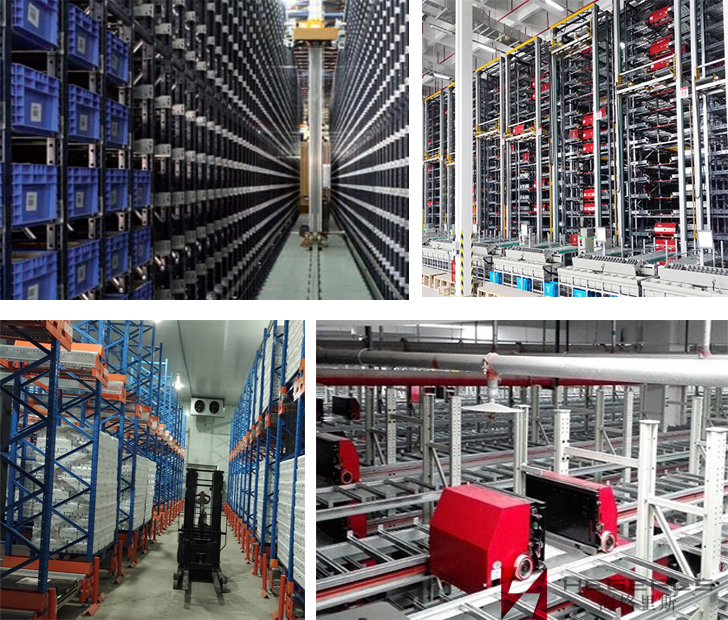
Dalam beberapa tahun terakhir, dengan popularitas Internet yang berkelanjutan, e-commerce telah berkembang pesat. Komoditas pesanan pelanggan menunjukkan karakteristik variasi yang banyak, batch yang sedikit, dan waktu pengiriman yang singkat, sehingga kepadatan penyimpanan rak di pusat distribusi logistik pemasok terus meningkat. Frekuensi material masuk dan keluar gudang semakin meningkat. Jumlah pengambilan suku cadang kecil meningkat dari hari ke hari. Semakin banyak pusat distribusi logistik yang menggunakan sistem pengambilan barang ke orang berbasis mobil antar-jemput.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Garpu teleskopik penjepit banyak digunakan dalam peralatan penyimpanan otomatis seperti mobil antar-jemput multi-lapis gudang stereo, tempat sampah tipe rak AGV, RGV, dan muatan mini. Berat maksimal kotak material yang dipegang HEGERLS bisa mencapai 50Kg. Lebar penjepitan lengan garpu dapat disesuaikan secara sewenang-wenang dalam kisaran 200~600mm. Perjalanan pengambilan maksimum adalah 840mm. Kecepatan pengoperasian maksimum garpu teleskopik adalah 1,5m/s, dan akselerasinya 1,2m/s ²。 Kebisingan pengoperasian dikontrol dalam 75dB, yang dapat memenuhi persyaratan sebagian besar rak ekstensi tunggal dan ganda. HEGERLS juga dapat menyesuaikan gudang stereoskopis mobil antar-jemput multi-lapis dari kotak garpu teleskopik pegangan sesuai dengan kebutuhan spesifik pelanggan, seperti lebar pegangan, langkah pengambilan, dan parameter lainnya.
Bagian-bagian dalam gudang stereo mobil antar-jemput multi-lapis kotak garpu teleskopik Hiygris HEGERLS mencengkeram Garpu teleskopik adalah mekanisme teleskopik yang digunakan di gudang stereo dan sistem penyimpanan otomatis logistik untuk penyimpanan atau pemindahan material. Ini memiliki fungsi ekspansi otomatis dua arah yang fleksibel dan fungsi batas yang akurat! Ini dapat dipasang langsung pada penumpuk, atau dipasang pada mekanisme pengangkatan tetap, atau dipasang pada platform pengangkat bergerak. Penumpuk berjalan melalui jalur antar rak untuk mengakses atau mentransfer item secara otomatis! Hal ini dapat dihubungkan dengan sistem jalur produksi dan sistem manajemen perusahaan. Ia menggunakan teknologi komputer dan kode batang (encoder) untuk mewujudkan manajemen dan pengoperasian informasi yang cerdas!

Tentang Garpu Teleskopik Penjepit HEGERLS
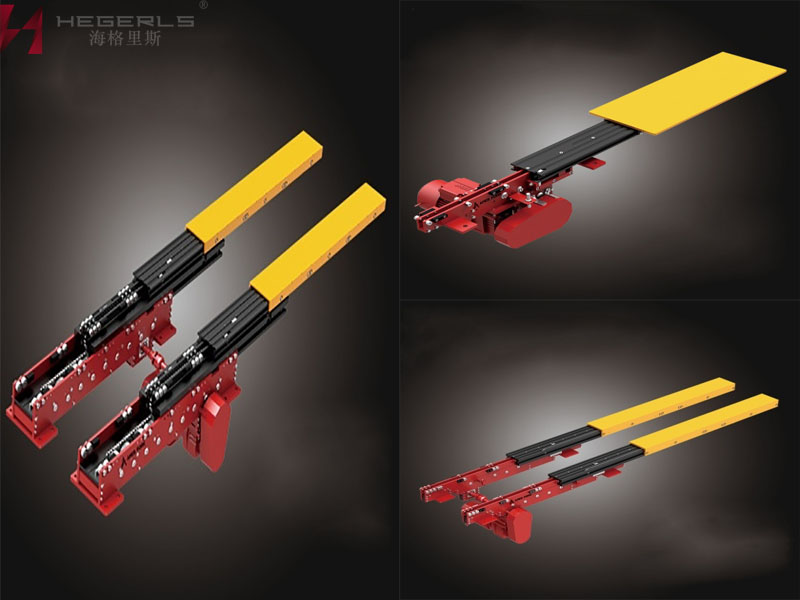
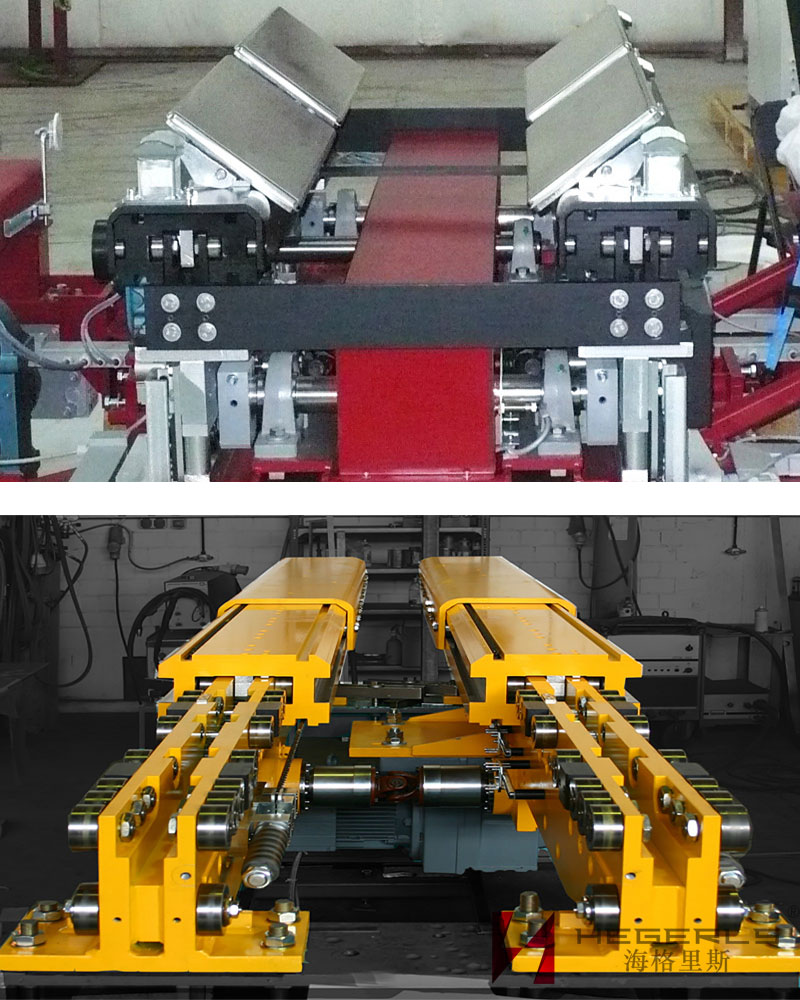
Garpu gripper teleskopik HEGERLS adalah jenis garpu unik dalam rangkaian garpu teleskopik penumpuk, yaitu garpu gripper teleskopik otomatis dua arah, juga dikenal sebagai garpu gripper penahan atau garpu gripper penahan, garpu garpu atau garpu garpu. . Ini adalah garpu yang khusus digunakan untuk memindahkan tempat sampah kecil. Dapat langsung dirakit pada AGV pemetik bertingkat atau platform kerja lainnya, dengan perluasan lengan garpu dan kopling tuas (pengait), Selesaikan tindakan akses atau transfer!
Garpu gripper HEGERLS sebagian besar terbuat dari paduan aluminium, memiliki ukuran kecil, ringan, kecepatan lari cepat, dan ekspansi halus. Pada saat yang sama, ia juga mengadopsi prinsip sinkronisasi multi motor, menyadari bahwa mekanisme garpu teleskopik yang sama dapat digunakan untuk mentransfer atau mengakses kotak dengan spesifikasi berbeda. Ini tidak hanya secara efektif meningkatkan efisiensi penyimpanan, tetapi juga sangat meningkatkan tingkat pemanfaatan ruang penyimpanan, terutama untuk pergudangan cerdas intensif bertingkat tinggi!
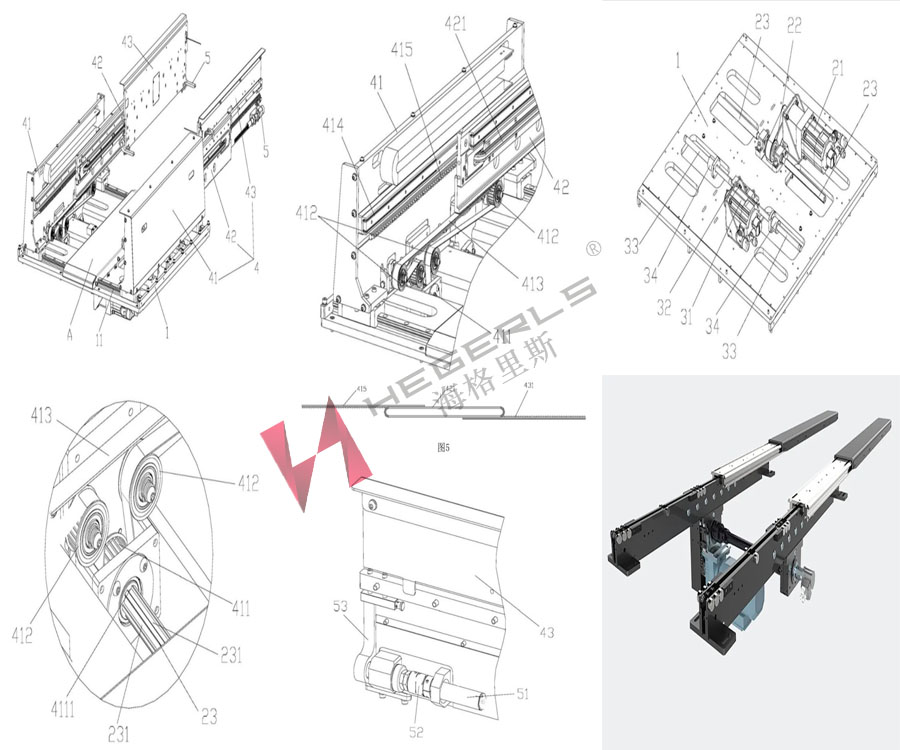
Klip HEGERLS pada struktur garpu teleskopik
Struktur garpu gripper HEGERLS dapat dibagi menjadi lokasi penyimpanan dalam dan lokasi penyimpanan dangkal. Lokasi penyimpanan dalam adalah lokasi penyimpanan dengan dua kotak material, dan lokasi penyimpanan dangkal adalah lokasi penyimpanan dengan satu kotak material. Artinya, lokasi penyimpanan yang dalam dapat menjepit dua kotak material sekaligus, sedangkan lokasi penyimpanan yang dangkal hanya dapat menjepit satu kotak material dalam satu waktu. Perbedaan antara garpu gripper HEGERLS dengan garpu teleskopik duplex biasa adalah garpu penarik jari masih terdiri dari tiga badan garpu, yaitu badan garpu dalam, badan garpu tengah, dan badan garpu luar, kecuali badan garpu depan. mempunyai satu lagi batang penarik (hook), yang dipadukan dengan rel pemandu (slide rail), roller bar, roda sinkron, sabuk sinkron, fluent bar, shift rod (hook), jacking poros, wheel bar, motor penggerak (servo) , motor batang pemindah Instrumen pendeteksi dan komponen lainnya membentuk mekanisme teleskopik lengkap, yang bekerja sama dengan lengan garpu teleskopik dan kopling tuas (pengait) untuk menyelesaikan tindakan akses atau transfer!
Prinsip kerja klip HEGERLS pada garpu teleskopik
Lengan garpu garpu gripper HEGERLS berdiri di samping dan dihubungkan secara lateral dengan rel pemandu. Melalui kontrol, rel pemandu dapat digeser maju mundur untuk menyesuaikan jarak antara kedua lengan garpu, sehingga mencapai penggunaan umum garpu untuk kotak material multi spesifikasi! Saat mengambil bahan, garpu memanjang ke posisi penyimpanan bahan, kait penahan (tuas) secara otomatis menurunkan dan menghalangi permukaan ujung karton atau kotak plastik, kemudian garpu memendek, menyeret karton atau kotak plastik ke tengah. garpu, lalu bergerak mundur sesuai dengan persyaratan derajat, pengait (tuas) ditarik ke belakang, dan garpu ditarik kembali untuk menyelesaikan tugas mengambil atau memindahkan! Meskipun prinsip garpu gripper sama dengan garpu teleskopik biasa, bagian transmisi, batang penghubung, dan komponen garpu jari lainnya sangat berbeda. Hal ini digunakan untuk menggambarkan bahwa roda rantai, rantai, roda gigi, rak, dll. semuanya digantikan oleh roda sinkron, sabuk sinkron, dll., sedangkan lengan geser menggunakan rel pemandu, dan bahan badan garpu semuanya diganti dengan lembaran logam atau bahan alumunium alloy, sehingga bobot garpu gripper hanya sekitar 80kg.
Selain itu, perlu dicatat bahwa selama desain garpu teleskopik tipe gripper, ukuran rak penyimpanan yang padat, posisi vertikal rak dengan kotak, tingkat lintasan dan ukuran kotak harus digabungkan untuk menentukan parameter keseluruhan garpu ekstensi (pergerakan garpu ekstensi, jarak kotak, lebar garpu, lebar internal garpu, tinggi garpu, dll.), untuk memenuhi kebutuhan wadah di rak. Garpu penjepit hanya dapat memindahkan atau mengakses produk yang dikemas dalam karton atau kotak plastik secara efektif, dan tidak dapat memindahkan bahan yang tidak beraturan. Selain itu, volume dan berat kotak material yang dipindahkan tidak boleh terlalu besar, dan berat muatan tidak boleh melebihi 100KG! Ketinggian garpu penjepit umumnya dirancang sesuai dengan ketinggian wadah!
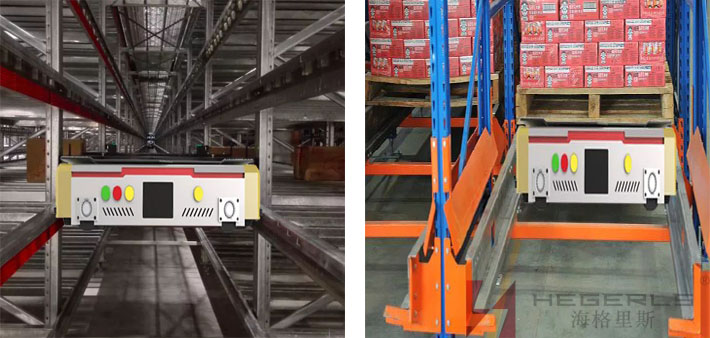
Tentang HEGERLS Clip on Shuttle
Struktur clip on shuttle HEGERLS terdiri dari rangka shuttle, sasis shuttle, mekanisme perjalanan, mekanisme ekstensi garpu sekunder, kolektor, pelat bantalan dan platform bantalan. Strukturnya adalah sebagai berikut:
Setiap rangka pesawat ulang-alik biasanya merupakan rongga tertutup yang terdiri dari braket badan utama di kedua sisi, cangkang dan braket hub bagian dalam, dan masing-masing disusun di kedua ujung sasis pesawat ulang-alik; Cangkangnya dilengkapi penutup atas yang dapat dibuka dan ditutup melalui engsel pintu yang dapat diputar; Rak kawat panel disusun di atas braket hub; Mekanisme perjalanan terdiri dari roda penggerak, roda pasif, motor DC brushless, peredam dan poros penghubung; Kedua sisi rangka shuttle di salah satu ujung sasis shuttle dilengkapi dengan roda penggerak yang dihubungkan dengan poros penghubung, dan kedua sisi rangka shuttle di ujung lain dari sasis shuttle dilengkapi dengan roda pasif yang dihubungkan dengan poros penghubung; Motor DC brushless bekerja sama dengan peredam untuk menggerakkan roda penggerak dan menggerakkan roda pasif; Poros penghubung dilengkapi dengan encoder magnetik, yang melaluinya diperoleh posisi awal dan akhir pesawat ulang-alik pada lintasan lurus; Mekanisme perpanjangan garpu sekunder disusun secara simetris di sisi dalam rangka mobil antar-jemput; Sasis antar-jemput antara mekanisme ekstensi garpu sekunder dilengkapi dengan platform bantalan untuk menempatkan keranjang kargo; Rongga tertutup rangka mobil antar-jemput masing-masing dilengkapi dengan pelat bantalan, di mana pelat penggerak, pelat kendali utama dari mekanisme perjalanan dan pelat kendali utama dari mekanisme ekstensi garpu disusun secara berurutan; Pelat penggerak menggerakkan mekanisme perjalanan untuk menggerakkan pesawat ulang-alik agar berjalan pada lintasan lurus. Papan kendali utama mekanisme perjalanan mengontrol parameter lari dan posisi mulai berhenti pesawat ulang-alik, dan papan kendali utama mekanisme perpanjangan garpu mengontrol mekanisme perpanjangan garpu sekunder untuk mengambil dan meletakkan keranjang di rak; Sebuah alat pengumpul dipasang di antara mobil shuttle dan lintasan lurus, yang dihubungkan dengan kabel listrik yang disusun di dalam lintasan lurus dan digunakan untuk menyuplai tenaga untuk mobil shuttle. Fitur struktural klip pada mobil antar-jemput cerdas untuk penyimpanan juga terletak pada alur yang dipasang pada posisi di mana roda penggerak dan roda pasif masing-masing bersentuhan dengan poros penghubung, dan cincin penahan elastis dipasang pada alur untuk membentuk aksial. posisi roda penggerak dan roda pasif. Roda pemandu ganda masing-masing dipasang di sisi sasis shuttle di bawah roda penggerak dan roda pasif, dan di antara lintasan lurus dan sasis shuttle. Roda pemandu ganda membentuk batas kiri dan kanan ketika roda penggerak dan roda pasif berjalan pada lintasan lurus. Mekanisme perpanjangan garpu sekunder meliputi: pelat dorong ekstensi garpu tingkat pertama, pelat ekstensi garpu tingkat kedua, mekanisme katrol sinkron tingkat kedua, mekanisme penggerak ekstensi garpu tingkat kedua, motor penggerak ekstensi garpu, peredam lain, dan poros penggerak ; Sisi luar braket hub rangka mobil antar-jemput dilengkapi dengan pelat dorong ekstensi garpu tahap pertama; Saluran berbentuk U disusun di tengah pelat pendorong garpu tahap pertama, dan beberapa katrol saluran berbentuk U disusun pada interval yang sama dalam saluran berbentuk U; Pelat garpu sekunder disusun di luar saluran berbentuk U; Pelat garpu sekunder dihubungkan dengan beberapa katrol alur berbentuk U melalui baut dan mur; Ujung atas pelat ekstensi garpu tahap kedua masing-masing dilengkapi dengan garpu pemindah, motor peredam planetary DC, dan sensor fotolistrik dari luar ke dalam; Sensor fotolistrik digunakan untuk memperoleh sinyal posisi garpu dan mengirimkannya ke papan kontrol utama mekanisme ekstensi garpu, yang mengontrol motor peredam planet DC untuk menggerakkan garpu agar bergerak secara horizontal atau vertikal; Mekanisme katrol sinkron sekunder masing-masing disusun pada pelat pendorong garpu primer dan tepat di bawah dan di atas saluran berbentuk U; Mekanisme katrol sinkron sekunder dihubungkan dengan pelat penekan sabuk sinkron pada pelat ekstensi garpu sekunder; Motor penggerak ekstensi garpu dan peredam lainnya menggerakkan mekanisme penggerak ekstensi garpu sekunder untuk bergerak, dan menggerakkan mekanisme penggerak ekstensi garpu sekunder di sisi lain untuk bergerak melalui poros penggerak, sehingga pelat dorong ekstensi garpu primer bergerak dan menggerakkan sekunder. mekanisme katrol sinkron untuk bergerak, sehingga mendorong pelat ekstensi garpu sekunder untuk bergerak. Mekanisme transmisi ekstensi garpu dua tahap terdiri dari encoder magnetik, katrol sabuk sinkron I, sabuk sinkron I, perangkat roda penegang dan rak; Katrol timing belt 1 dan timing belt 1 disusun di bawah pelat pendorong garpu tahap pertama; Satu sisi katrol sabuk sinkron I dihubungkan dengan poros transmisi, dan sisi lainnya dihubungkan dengan poros keluaran peredam lainnya melalui alur pasak. Perangkat roda penegang masing-masing dipasang di kedua sisi peredam lainnya untuk fiksasi tambahan katrol sabuk sinkron I dan sabuk sinkron I; Sebuah rak disusun antara pelat pendorong garpu tahap pertama dan sabuk sinkron; Motor penggerak ekstensi garpu dan peredam lainnya menggerakkan katrol sabuk sinkron I dan sabuk sinkron I untuk berputar, dan menggerakkan katrol sabuk sinkron II dan sabuk sinkron II di sisi lain untuk berputar melalui poros transmisi. Pada saat yang sama, rak di kedua sisi menggerakkan pelat dorong ekstensi garpu utama yang sesuai untuk mencapai ekstensi garpu utama. Ketika mekanisme katrol sabuk sinkron sekunder bergerak secara serempak dan menggerakkan pelat ekstensi garpu sekunder untuk bergerak, katrol berbentuk U menggelinding di saluran berbentuk U, Membuat pelat ekstensi garpu sekunder mewujudkan ekstensi garpu sekunder. Perangkat roda penegang meliputi: baut, braket penyetel, mur ganda dan roda penegang; Roda penegang disusun di bawah sabuk sinkron I dan di kedua sisi peredam lainnya, dan dipasang pada braket bodi utama melalui mur ganda; Braket penyetel disusun di bawah mur ganda melalui baut, dan posisi braket penyetel diatur oleh baut, sehingga braket penyetel menggerakkan mur ganda untuk bergerak ke atas dan ke bawah, sehingga sabuk sinkron I dapat mempertahankannya. keadaan ketegangan di bawah aksi roda penegang.
Apa keuntungan yang didapat perusahaan penggerak shuttle bus HEGERLS?
Pertama, mekanisme perjalanan, mekanisme dan rangka perpanjangan garpu, garis kontak geser, dan perangkat pengumpul daya pada mobil antar-jemput cerdas HEGERLS dengan penyimpanan klip diatur secara wajar, yang memanfaatkan sepenuhnya ruang mobil antar-jemput, dan dapat beradaptasi dengan penyimpanan otomatis dan pengambilan barang dengan spesifikasi dan lokasi berbeda di gudang tiga dimensi, memperluas cakupan aplikasi mobil antar-jemput, dan dengan cepat dan efektif menyelesaikan serangkaian tindakan berkelanjutan dari mobil antar-jemput, seperti berjalan, ekstensi garpu, memetik menyiapkan dan menempatkan barang, Ini mewujudkan penyimpanan barang yang cepat dan akurat, sehingga sangat meningkatkan efisiensi operasi dan tingkat teknologi otomasi gudang otomatis, dan mengurangi biaya investasi perusahaan. Pada saat yang sama, strukturnya sederhana dan ringan, keandalannya tinggi, dan perawatannya mudah. Ini dapat menggantikan penumpuk jalan raya tradisional, mewujudkan fleksibilitas sistem, dan sesuai dengan tren perkembangan logistik e-commerce dan otomatisasi pergudangan.
Kedua, dalam mekanisme perjalanan mobil antar-jemput cerdas HEGERLS, poros penghubung roda penggerak dan roda pasif dilengkapi dengan alur, dan bagian penghubung bantalan dihubungkan dengan cincin penahan elastis jenis baru, mewujudkan efek posisi aksial dari penghubung poros; Dengan menggunakan cincin penahan elastis untuk mencapai efek posisi aksial, efisiensi produksi dapat ditingkatkan dan biaya dapat dihemat.
Ketiga: Mobil antar-jemput cerdas Higelis HEGERLS untuk menyimpan penyimpanan menyadari bahwa roda penggerak dan roda pasif selalu bergerak pada lintasan lurus tanpa menyimpang dari lintasan melalui struktur roda pemandu ganda. Struktur penentuan posisi ini lebih stabil dan dapat diandalkan.
Keempat, struktur ekstensi garpu sekunder yang diadopsi oleh mobil antar-jemput cerdas HEGERLS dapat membuat jarak ekstensi garpu lebih jauh dan memperoleh lebih banyak keranjang pada posisi berbeda; Pada saat yang sama, prinsip mekanisme perpanjangan garpu sekunder sederhana, dan biaya desain dan pembuatannya rendah; Bagian transmisi mengadopsi mode motor tunggal+peredam+poros transmisi untuk membuat mekanisme ekstensi garpu sekunder mencapai tujuan ekspansi dan kontraksi sinkron, yang menghemat lebih banyak biaya, secara efektif mengurangi ruang tata letak yang diperlukan, dan mengurangi bobot mobil antar-jemput .
Kelima, mobil shuttle cerdas Higelis HEGERLS mengadopsi perangkat roda pengencang jenis baru, yang dapat dengan cepat menjaga sabuk sinkron tetap kencang dan mewujudkan kerja normal mobil shuttle. Selain itu, perangkat roda penegang ini mudah dibuat, mudah dipasang, dan dapat disetel dengan cepat, sehingga menghemat biaya, menghemat ruang, dan meningkatkan efisiensi kerja.
Waktu posting: 19 Des-2022